Задачата за линейно програмиране в каноничен вид трябва да включва само равенства и неотрицателни променливи. Конвенцията в този курс е, че в каноничния вид се търси максимума на целевата функция.
Трансформацията от произволна задача за линейно програмиране към каноничен вид се извършва по следния начин:
В случай на минимизационна задача, целевата функция се умножава с -1 и се търси максимума на новата целева функция.
Неравенствата от типа \leq се преобразуват до равенства чрез добавяне на неотрицателни променливи.
Неравенствата от типа \geq се преобразуват до равенства чрез изваждане на неотрицателна променлива.
Равенствата се запазват.
Променливи, които могат да са и отрицателни (неограничени), се представят като разлика на две неотрицателни променливи. Например печалбата от продажба на даден продукт (която може да е отрицателна, т.е. загуба) може да се представи като разлика на две неотрицателни променливи: приходи и разходи.
Упражнение 7.1 Каква е каноничната форма на следната оптимизационна задача?
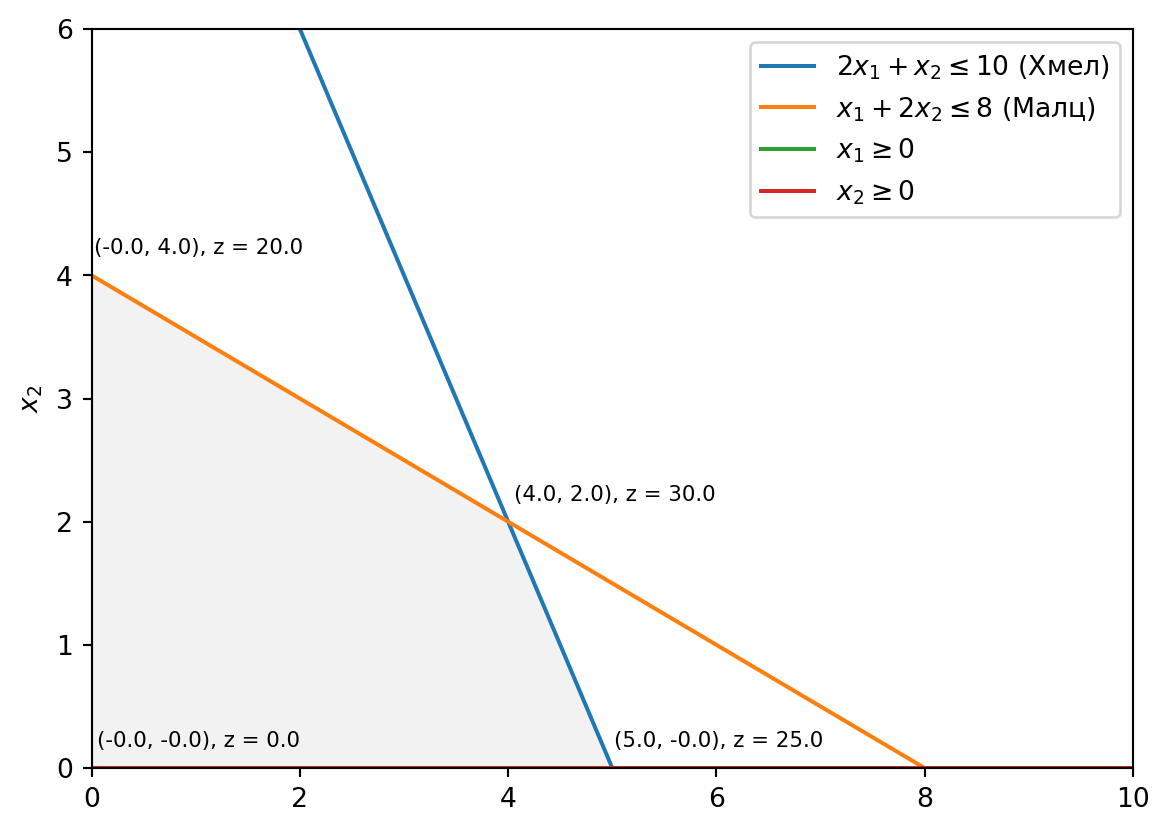
Нека разгледаме следната оптимизационна задача, в която търсим оптималния производствен план на пивоварна, която произвежда два вида бира: светла и тъмна и използва два ресурса: хмел и малц.
import polytope as pcimport numpy as npfrom matplotlib import pyplot as pltA = np.array([[2, 1], [1, 2], [-1, 0], [0, -1]])b = np.array([10, 8, 0, 0])P = pc.Polytope(A, b)P_extr = pc.extreme(P)# Plot the polytope and its extreme pointsfig, ax = plt.subplots()# Plot the lines of the inequalitiesx = np.linspace(-1, 10, 100)constr_label = [r"$2x_1 + x_2 \leq 10$(Хмел)",r"$x_1 + 2x_2 \leq 8$(Малц)",r"$x_1 \geq 0$",r"$x_2 \geq 0$"]for i inrange(A.shape[0]): y = (b[i] - A[i, 0] * x) / A[i, 1] ax.plot(x, y, label=constr_label[i])for i, p inenumerate(P_extr): z = np.dot(p, np.array([5, 5])) ax.annotate(f"({p[0]}, {p[1]}), z = {z}", (p[0], p[1]), textcoords="offset points", xytext=(40, 8), ha='center', fontsize=8)# Shade the feasible regionax.fill_between(x, 0, np.minimum((b[0] - A[0, 0] * x) / A[0, 1], (b[1] - A[1, 0] * x) / A[1, 1]), where=(x >=0), color='gray', alpha=0.1)ax.set_xlim(0, 10)ax.set_ylim(0, 6)ax.set_label(r"$x_1$")ax.set_ylabel(r"$x_2$")ax.legend()
`polytope` failed to import `cvxopt.glpk`.
will use `scipy.optimize.linprog`
/tmp/ipykernel_3790/3486167049.py:25: RuntimeWarning:
divide by zero encountered in divide
/tmp/ipykernel_3790/3486167049.py:25: RuntimeWarning:
invalid value encountered in divide
Фигура 7.1: Допустимо множество и стойност на целевата функция във върховете му.
# Create a 3d scatter plot for the vertices of the feasible region with plotlyimport plotly.graph_objects as gofig = go.Figure(data=[go.Scatter3d( x=vertices_x, y=vertices_y, z=[0] *len(vertices_x), mode='markers+text', marker=dict(size=2, color='red'), text=[f"({v[0]}, {v[1]}, 0)"for v in vertices], textposition="top center")])# Draw lines connecting the verticesfor i inrange(len(vertices)): x_line = [vertices[i][0], vertices[(i +1) %len(vertices)][0]] y_line = [vertices[i][1], vertices[(i +1) %len(vertices)][1]] z_line = [0, 0] fig.add_trace(go.Scatter3d( x=x_line, y=y_line, z=z_line, mode='lines', line=dict(color='blue', width=2) ))fig.update_layout( title="Die Zielfunktion des Kaffeeproblems", scene=dict( xaxis_title=r"Super (kg)", yaxis_title=r"Deluxe (kg)", zaxis_title=r"Gewinn (Euro)", zaxis=dict(range=[0, 40]), aspectmode='cube' ), showlegend=False)# Draw the plane of the objective functionX1 = np.linspace(0, 10, 20)X2 = np.linspace(0, 10, 20)X1, X2 = np.meshgrid(X1, X2)Z =5* X1 +5* X2fig.add_trace(go.Surface( x=X1, y=X2, z=Z, opacity=0.5, colorscale='Viridis'))# Draw a plane at level z = 6000z_plane_1 =25fig.add_trace(go.Surface( x=X1, y=X2, z=np.full(X1.shape, z_plane_1), opacity=0.2, colorscale='Viridis', showscale=False))# Draw a line at the intersection of the objective plane and the z = 10000 planeintersection_x_1 = np.linspace(0, 250, 20)intersection_y_1 = (z_plane_1 -5* intersection_x_1) /5fig.add_trace(go.Scatter3d( x=intersection_x_1, y=intersection_y_1, z=[z_plane_1] *len(intersection_x_1), mode='lines', opacity=0.4, line=dict(color='red', width=3), name='Intersection'))# Draw the intersection line on the xy planefig.add_trace(go.Scatter3d( x=intersection_x_1, y=intersection_y_1, z=[0] *len(intersection_x_1), mode='lines', opacity=0.4, line=dict(color='red', width=2), name='Intersection'))fig.update_layout( title="Функция на печалба", scene=dict( xaxis_title=r"Светла бира", yaxis_title=r"Тъмна бира", zaxis_title=r"Печалба", zaxis=dict(range=[0, 32]), yaxis=dict(range=[0, 6]), xaxis=dict(range=[0, 6]), aspectmode='cube' ), showlegend=False)# Draw a plane at the optimal solution z = 12000z_plane_2 =30fig.add_trace(go.Surface( x=X1, y=X2, z=np.full(X1.shape, z_plane_2), opacity=0.2, colorscale='Viridis', showscale=False))intersection_x = np.linspace(0, 250, 20)intersection_y = (z_plane_2 -5* intersection_x) /5# Draw the intersection line on the xy planefig.add_trace(go.Scatter3d( x=intersection_x, y=intersection_y, z=[z_plane_2] *len(intersection_x), mode='lines', opacity=0.4, line=dict(color='red', width=3), name='Intersection'))fig.add_trace(go.Scatter3d( x=intersection_x, y=intersection_y, z=[0] *len(intersection_x), mode='lines', opacity=0.4, line=dict(color='red', width=3), name='Intersection'))fig.show()
Фигура 7.2: Целева функтия и допустимо множество
Тази система уравнения има две уравнения и четири променливи (x_1, x_2, s_1, s_2) и по тази причина има безкрайно много решения. Ако фиксираме две от променливите и ги сложим да са равни на нула, бихме могли да намерим решение на системата уравнения.
ВажноБазисни променливи
За да намерим решение на системата уравнения, фиксираме част от променливите да са равни на нула (брой променливи - брой уравнения = 2) и решаваме за останалите променливи. Защо не фиксираме частта от променливите да са равни на други стойности, например можем да фиксираме x_1 =2, x_2 = 1 и пак ще намерим решение за s_1 и s_2. По този начин обаче ще намерим вътрешна точка от допустимото множество. Точката x_1 = 2, x_2 = 1 не се намира на ръба на допустимото множество (Фигура 7.1) и следователно не може да е оптималния производствен план.
Когато всички ограничения са неравенства са всички от вида по-малко от \leq, какъвто е случая на тази задача, лесно можем да намерим едно решение, като сложим хиксовете да са равни на нула: x_1 = 0, x_2 = 0. Тогава можем да решим за останалите две променливи: s_1 и s_2. Това първоначално решение наричаме начален опорен план (връх на допустимото множество). Променливите, които сме фиксирали да са равни на нула наричаме небазисни променливите, а останалите наричаме базисни.
Tъй като изразите включващи x_1 и x_2 са равни на нула във върха, който разглеждаме в момента, от тази система лесно виждаме на колко са равни базисните променливи.
Върха, в който се намира алгоритъмът в момента е (x_1 = 0, x_2 = 0, s_1 = 10, s_2 = 8). Във Фигура 7.1 това е точката (0, 0) или с други думи това е производствен план, в който фирмата не произвежда нищо. s_1 = 10 означава, че в този производствен план фирмата разполага с 10 неизползвани единици хмел. s_2 = 8 означава, че фирмата разполага с 8 неизползвани единици малц.
Същото можем да направим и с целевата функция:
\begin{align*}
Z = 0 - (-5x_1 - 5x_2)
\end{align*}
\tag{7.3}
Таблица 7.1: Първоначална симплекс таблица
Итерация 1
C_j
5
5
0
0
Базисни пр.
C_B
X_B
x_1
x_2
s_1
s_2
X_B/x_1
s_1
0
10
2
1
1
0
10 / 2 = 5
s_2
0
8
1
2
0
1
8 / 1 = 8
Z
0
Z_j
0
0
0
0
\Delta_j = Z_j - C_j
0 -5 = -5
0 -5 = -5
0
0
където C_j са коефициентите на променливите в целевата функция, C_B са коефициентите на базисните променливи в целевата функция. Редът Z_j получаваме, като образуваме сумата на произведенията на коефициентите на променливите в системата уравнения и коефициентите на базисните променливи в целевата функция. За x_1 получаваме: 0 \cdot 2 + 0 \cdot 1 = 0. Индексната оценка на x_1 получаваме, като от Z_j извадим коефициента на x_1 в целевата функция: \Delta_j = Z_j - C_j = 0 - 5 = -5. По същия начин изчисляваме индексните оценки и на останалите променливи. Обърнете внимание, че тези индексни оценки съответстват на коефициентите на не-базисните променливи в целевата функция в Уравнение 7.3. Стойността на целевата функция получаваме, като съберем произведението на X_B и C_B: 10 \cdot 0 + 8 \cdot 0 = 0.
Индексните оценки ни показват с колко би се променила целевата функция, ако увеличим променливата с една единица. Отрицателни индексни оценки означават увеличение на целевата функция. В настоящия пример индексните оценки са отрицателни за x_1 и x_2, което означава, че печалбата на фирмата би нараснала, ако увеличим производството на светла или тъмна бира. Тъй като нарастването на печалбата е еднакво и за двата продукта избираме (произволно) да увеличим x_1.
Важно
Във всяка стъпка на симплекс алгоритъма променяме само една небазисна променлива. В настоящата стъпка увеличаваме x_1, т.е. от нула тя става положителна, но другата небазисна променлива (x_2) остава равна на нула.
Въпросът сега е с колко най-много можем да увеличим производството на светла бира без да нарушаваме ограниченията. Отговор на този въпрос ни дава колонката X_B / x_1. Най-малката стойност в тази колонка е 5, което означава, че можем да увеличим x_1 най-много до 5. За да се убедим, че това е така, можем да заместим с x_1 = 8 в първото уравнение от системата 7.2:
Това уравнение е изпълнено за s_1 = -6, но това нарушава ограничението за неотрицателност на s_1. Избрахме да увеличим x_1 от 0 в настоящото решение на 5, т.е. x_1 става базисна променлива. Видяхме, че най-малката стойност на X_B / x_1 е в първия ред на таблицата, който съответства на s_1. Това означава, че s_1 излиза от базиса и в следващото решение на системата ще е нула, а на нейно място в базиса влиза x_1.
За да видим дали върхът (x_1 = 5, x_2 = 0, s_1 = 0, s_2 = 4) е оптимален, изразяваме всяка базисна променлива (x_1 и s_2), както и целевата функция отново с не-базисни променливи, като искаме всяка базисна променлива да присъства само в едно уравнение и там коефициентът й да е 1. Във Фигура 7.1 това е точката (5, 0), в която производствения план е 5 единици светла бира, никакво производство на тъмна бира. s_1 е нула, т.е. хмелът е напълно изчерпан, а s_2 е 4, т.е. остават 4 единици малц.
БележкаПривеждане на системата в базисен вид
След като сме решили коя небазисна променлива ще влезе в базиса (множеството от базисни променливи) и на мястото на коя, искаме да изразим системата уравнения в базисен вид:
Изразяваме и целевата функция само с небазисни променливи, което в случая означава да заместим x_1 в предишното й представяне (z = 0 - (-5x_1 - 5x_2)).
При трансформирането на Таблица 7.1 в Таблица 7.2 правим абсолютно същото. Разделяме реда x_1 на 2 (коефициентът пред x_1) и след това изваждаме първия ред от втория ред, за да елиминираме x_1 от втория ред. В крайна сметка коефициентите в таблицата трябва да съответстват на коефициентите в системата уравнения 7.4, a стойностите на индексните оценки (\Delta_j) да съответстват на коефициентите в целевата функция 7.5.
Таблица 7.2: Симплекс таблица след първата итерация
Итерация 2
C_j
5
5
0
0
Базисни пр.
C_B
X_B
x_1
x_2
s_1
s_2
X_B/x_2
x_1
5
5
1
1/2
1/2
0
5 / (1/2) = 10
s_2
0
3
0
3/2
-1/2
1
3 / (3/2) = 2
Z
25
Z_j
5
5/2
5/2
0
\Delta_j
0
-5/2
5/2
0
От индексните оценки виждаме, че планът (x_1 = 5, x_2 = 0, s_1 = 0, s_2 = 3) не е оптимален, защото s_2 не е базисна променлива с отрицателна индексна оценка. Най-голямото възможно увеличение на x_2 е 2 (втори ред), следователно x_2 влиза в базиса на мястото на s_2.
ВажноИнтерпретация на индексните оценки
Нека да погледнем как сме изчислили индексната оценка на x_2 = 5/2. Първата част от изчислението е Z_j = 5 \cdot 1/2 + 0 \cdot 3/2 = 5/2. Уравненията 7.4 ни дават ключ към това да разберем какво представлява Z_j. Върхът на допустимото множество, в който се намираме в момента е (x_1 = 5, x_2 = 0, s_1 = 0, s_2 = 3) и тъй като всичката ни наличност на хмел в този производствен план е вече предназначен за производството на светла бира, не можем просто да започнем да произвеждаме тъмна бира (да увеличим x_2 от нула в момента до някаква положителна стойност), защото нямаме свободен хмел за това. За да можем да започнем производство на тъмна бира ще трябва да намалим производството на светлата бира, за да освободим хмел.
Коефициентът 1/2 в таблицата ни казва от колко единици светла бира трябва да се лишим, за да можем да произведем една единица тъмна бира. Това се вижда и от първото уравнение в 7.4. В настоящия производствен план (връх) x_1 = 5, x_2 = 0, s_1 = 0
По тази причина трябва или x_1 от 5 да стане (5 - 1/2 = 4.5), или s_1 от 0 да стане (0 - 1/2 = -1/2). s_1 не може да стане отрицателна, така че остава само първата възможност.
Тъй като в момента печалбата ни се формира от продажбата на светла бира, намаленото й производство е свързано с пропуснати ползи равни на намаленото количество (1/2) умножено по печалбата от единица светла бира (5).
Аналогично е разсъждението и за второто произведение в изчислението на Z_j за x_2. Единствената разлика е, че тъй като малцът има коефициент нула в целевата функция, не губим печалба, когато намалим s_2, т.е. количеството свободен малц.
За да стигнем до индексната оценка \Delta_j от общите пропуснати ползи изваждаме печалбата от единица тъмна бира (5). Ако печалбата от тази единица надхвърля пропуснатите ползи, тогава \Delta_j < 0.
Преобразуваме системата уравнения 7.4, така че новите базисни променливи да присъстват само в по едно уравнение и в него да имат коефициент 1 и изразяваме целевата функция с небазисните променливи:
Изразяваме целевата функция само с небазисни променливи:
\begin{align*}
z = 25 - \frac{5}{2}s_1 + 2.5\left(\frac{1}{3}s_1 - \frac{1}{1.5}s_2\right)\\
z = 30 - (1.66s_1 + 1.66s_2)
\end{align*}
\tag{7.7}
При преобразуването на таблица Таблица 7.2 в Таблица 7.3 правим абсолютно същото. Разделяме реда x_2 на 3/2 (коефициентът пред x_2). След това искаме да елиминираме x_2 от реда на x_1. Това можем да направим, като от първото уравнение извадим второто уравнение, умножено по 1/2. В крайна сметка трябва да получим същите коефициенти в таблицата, както и в системата уравнения 7.6, а стойностите на индексните оценки (\Delta_j) да съответстват на коефициентите в целевата функция 7.7.
Таблица 7.3: Последна симплекс таблица
Итерация 3
C_j
5
5
0
0
Базисни пр.
C_B
X_B
x_1
x_2
s_1
s_2
x_1
5
4
1
0
2/3
-1/3
x_2
5
2
0
1
-1/3
2/3
Z = 30
Z_j
5
5
1.667
1.667
\Delta_j
0
0
1.667
1.667
Планът е оптимален, защото няма небазисни променливи с отрицателни индексни оценки. Така получаваме, че решението на оптимизационната задача е: (x_1 = 4, x_2 = 2, s_1 = 0, s_2 = 0) при стойност на целевата функция Z^{*} = 30. Дефицитни са и двата ресурса: s_1 = 0, s_2 = 0.